A base class for all AI karts. More...
#include <ai_base_lap_controller.hpp>
Public Member Functions | |
| AIBaseLapController (AbstractKart *kart) | |
| This is the base class for all AIs. More... | |
| virtual void | reset () |
 Public Member Functions inherited from AIBaseController Public Member Functions inherited from AIBaseController | |
| AIBaseController (AbstractKart *kart) | |
| virtual bool | disableSlipstreamBonus () const OVERRIDE |
| Certain AI levels will not receive a slipstream bonus in order to be not as hard. | |
| virtual void | crashed (const Material *m) OVERRIDE |
| This is called when the kart crashed with the terrain. More... | |
| virtual void | crashed (const AbstractKart *k) OVERRIDE |
| virtual void | handleZipper (bool play_sound) OVERRIDE |
| virtual void | finishedRace (float time) OVERRIDE |
| Called whan this controller's kart finishes the last lap. | |
| virtual void | collectedItem (const ItemState &item, float previous_energy=0) OVERRIDE |
| virtual void | setPosition (int p) OVERRIDE |
| virtual bool | isPlayerController () const OVERRIDE |
| This function checks if this player is not an AI, i.e. More... | |
| virtual bool | isLocalPlayerController () const OVERRIDE |
| This function checks if this is a local player. More... | |
| virtual bool | action (PlayerAction action, int value, bool dry_run=false) OVERRIDE |
| Default: ignore actions. More... | |
| virtual void | skidBonusTriggered () OVERRIDE |
| virtual bool | saveState (BareNetworkString *buffer) const OVERRIDE |
| virtual void | rewindTo (BareNetworkString *buffer) OVERRIDE |
| void | setNetworkAI (bool val) |
| Public Member Functions inherited from Controller | |
| Controller (AbstractKart *kart) | |
| Constructor, saves the kart pointer and a pointer to the KartControl of the kart. | |
| virtual void | rumble (float strength_low, float strength_high, uint16_t duration) |
| const std::string & | getControllerName () const |
| Returns the name of this controller. | |
| virtual KartControl * | getControls () |
| Get a pointer on the kart controls. | |
| void | setControls (KartControl *kc) |
| virtual bool | canGetAchievements () const |
| Only local players can get achievements. | |
| virtual core::stringw | getName (bool include_handicap_string=true) const |
| Display name of the controller. More... | |
| AbstractKart * | getKart () const |
| Returns the kart controlled by this controller. | |
Protected Member Functions | |
| virtual void | update (int ticks) |
| Updates the ai base controller each time step. More... | |
| virtual unsigned int | getNextSector (unsigned int index) |
| Returns the next sector of the given sector index. More... | |
| virtual void | newLap (int lap) |
| Triggers a recomputation of the path to use, so that the AI does not always use the same way. | |
| float | steerToAngle (const unsigned int sector, const float angle) |
| This function steers towards a given angle. More... | |
| void | computePath () |
| Computes a path for the AI to follow. More... | |
| virtual void | raceFinished () |
| Nothing special to do when the race is finished. | |
| Protected Member Functions inherited from AIBaseController | |
| void | setControllerName (const std::string &name) OVERRIDE |
| In debug mode when the user specified –ai-debug on the command line set the name of the controller as on-screen text, so that the different AI controllers can be distinguished. More... | |
| float | steerToPoint (const Vec3 &point) |
| Computes the steering angle to reach a certain point. More... | |
| float | normalizeAngle (float angle) |
| Normalises an angle to be between -pi and _ pi. More... | |
| bool | isStuck () const |
| This can be called to detect if the kart is stuck (i.e. More... | |
| void | determineTurnRadius (const Vec3 &end, Vec3 *center, float *radius) const |
| Determine the center point and radius of a circle given two points on the circle and the tangent at the first point. More... | |
| virtual void | setSteering (float angle, float dt) |
| Converts the steering angle to a lr steering in the range of -1 to 1. More... | |
| virtual bool | canSkid (float steer_fraction)=0 |
| Return true if AI can skid now. | |
Protected Attributes | |
| int | m_track_node |
| The current node the kart is on. More... | |
| LinearWorld * | m_world |
| Keep a pointer to world. | |
| std::vector< int > | m_successor_index |
| Which of the successors of a node was selected by the AI. | |
| std::vector< int > | m_next_node_index |
| For each node in the graph this list contains the chosen next node. More... | |
| std::vector< std::vector< int > > | m_all_look_aheads |
| For each graph node this list contains a list of the next X graph nodes. | |
| Protected Attributes inherited from AIBaseController | |
| bool | m_enabled_network_ai |
| float | m_kart_length |
| Length of the kart, storing it here saves many function calls. | |
| float | m_kart_width |
| Cache width of kart. | |
| Track * | m_track |
| Keep a pointer to the track to reduce calls. | |
| const AIProperties * | m_ai_properties |
| A pointer to the AI properties for this kart. | |
| Protected Attributes inherited from Controller | |
| AbstractKart * | m_kart |
| Pointer to the kart that is controlled by this controller. | |
| KartControl * | m_controls |
| A pointer to the main controller, from which the kart takes it commands. | |
| std::string | m_controller_name |
| The name of the controller, mainly used for debugging purposes. | |
Additional Inherited Members | |
| Static Public Member Functions inherited from AIBaseController | |
| static void | enableDebug () |
| static void | setTestAI (int n) |
| static int | getTestAI () |
| Static Protected Attributes inherited from AIBaseController | |
| static bool | m_ai_debug = false |
| static int | m_test_ai = 0 |
| Stores the '–test-ai=n' command line parameter: It indicates which fraction of the AIs are going to be the test AI: 1 means only to use the TestAI, 2 means every second AI will be test etc. More... | |
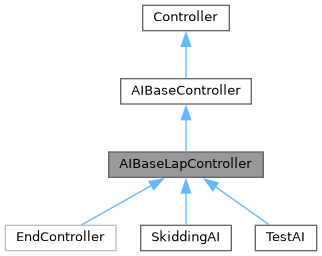
Detailed Description
A base class for all AI karts.
This class basically provides some common low level functions.
Constructor & Destructor Documentation
◆ AIBaseLapController()
| AIBaseLapController::AIBaseLapController | ( | AbstractKart * | kart | ) |
This is the base class for all AIs.
At this stage there are two similar AIs: one is the SkiddingAI, which is the AI used in lap based races (including follow-the-leader mode), the other one is the end controller, I.e. the controller that takes over from a player (or AI) when the race is finished.
This base class defines some basic operations:
- It takes care on which part of the DriveGraph the AI currently is.
- It determines which path the AI should take (in case of shortcuts or forks in the road).
At race start and every time a new lap is started, the AI will compute the path the kart is taking this lap (computePath). At this stage the decision which road in case of shortcut to take is purely random. It stores the information in two arrays: m_successor_index[i] stores which successor to take from node i. The successor is a number between 0 and number_of_successors - 1. m_next_node_index[i] stores the actual index of the graph node that follows after node i. Depending on operation one of the other data is more useful, so this class stores both information to avoid looking it up over and over. Once this is done (still in computePath), the array m_all_look_aheads is computed. This array stores for each quad a list of the next (atm) 10 quads. This is used when the AI is selecting where to drive next, and it will just pass the list of next quads to findRoadSector.
Note that the quad graph information is stored for every quad in the quad graph, even if the quad is not on the path chosen. This is necessary since it can happen that a kart ends up on a path not choses (e.g. perhaps it was pushed on that part, or couldn't get a sharp corner).
In update(), which gets called one per frame per AI, this object will determine the quad the kart is currently on (which is then used to determine where the kart will be driving to). This uses the m_all_look_aheads to speed up this process (since the kart is likely to be either on the same quad as it was before, or the next quad in the m_all_look_aheads list).
It will also check if the kart is stuck: this is done by maintaining a list of times when the kart hits the track. If (atm) more than 3 collisions happen in 1.5 seconds, the kart is considered stuck and will trigger a rescue (due to the pushback from the track it will take some time if a kart is really stuck before it will hit the track again).
This base class also contains some convenience functions which are useful in all AIs, e.g.:
- steerToPoint: determine the steering angle to use depending on the current location and the point the kart is driving to.
- normalizeAngle: To normalise the steering angle to be in [-PI,PI].
- setSteering: Converts the steering angle into a steering fraction in [-1,1].
Member Function Documentation
◆ computePath()
|
protected |
Computes a path for the AI to follow.
This function is called at race start and every time a new lap is started. Recomputing the path every time will mean that the kart will not always take the same path, but (potentially) vary from lap to lap. At this stage the decision is done randomly. The AI could be improved by collecting more information about each branch of a track, and selecting the 'appropriate' one (e.g. if the AI is far ahead, chose a longer/slower path).
◆ getNextSector()
|
protectedvirtual |
Returns the next sector of the given sector index.
This is used for branches in the quad graph to select which way the AI kart should go. This is a very simple implementation that always returns the first successor, but it can be overridden to allow a better selection.
- Parameters
-
index Index of the graph node for which the successor is searched.
- Returns
- Returns the successor of this graph node.
Reimplemented in TestAI, and SkiddingAI.
◆ steerToAngle()
|
protected |
This function steers towards a given angle.
It also takes a plunger attached to this kart into account by modifying the actual steer angle somewhat to simulate driving without seeing.
◆ update()
|
protectedvirtual |
Updates the ai base controller each time step.
Note that any calls to isStuck() must be done before update is called, since update will call AIBaseController::update() which will reset the isStuck flag!
- Parameters
-
ticks Number of physics time steps - should be 1.
Reimplemented from AIBaseController.
Reimplemented in TestAI, SkiddingAI, and EndController.
Member Data Documentation
◆ m_next_node_index
|
protected |
For each node in the graph this list contains the chosen next node.
For normal lap track without branches we always have m_next_node_index[i] = (i+1) % size; but if a branch is possible, the AI will select one option here. If the node is not used, m_next_node_index will be -1.
◆ m_track_node
|
protected |
The current node the kart is on.
This can be different from the value in LinearWorld, since it takes the chosen path of the AI into account (e.g. the closest point in LinearWorld might be on a branch not chosen by the AI).
The documentation for this class was generated from the following files:
- karts/controller/ai_base_lap_controller.hpp
- karts/controller/ai_base_lap_controller.cpp